原文链接 :Multiagent Planning in AI
在人工智能(AI)的广阔领域中,多智能体规划是一个核心方向,它协调多个自主智能体之间的协同作用以实现集体目标。该领域涵盖了一系列策略和方法,旨在协调各类智能体在动态环境中的决策过程。
1 什么是多智能体系统(MAS)
多智能体规划将传统的 AI 规划范式扩展到多个智能体交互协作的场景 —— 每个智能体都具备独特的能力、知识和目标,共同朝着共享或相互关联的目标努力。这些智能体可呈现多种形式,包括软件智能体、机器人或人机混合系统。
多智能体系统(MAS)由环境中多个相互作用的智能体组成。系统中的每个智能体都是独立的,能够根据自身观察和目标自主行动并做出决策。智能体之间的交互可分为合作型、竞争型或中立型,具体取决于系统的设计和目标。多智能体系统的核心目标是解决那些因复杂性、规模或专业知识需求而单个智能体难以甚至无法处理的问题。
2 Multiagent Planning的组成部分
多智能体规划的组成部分可大致分为四类:
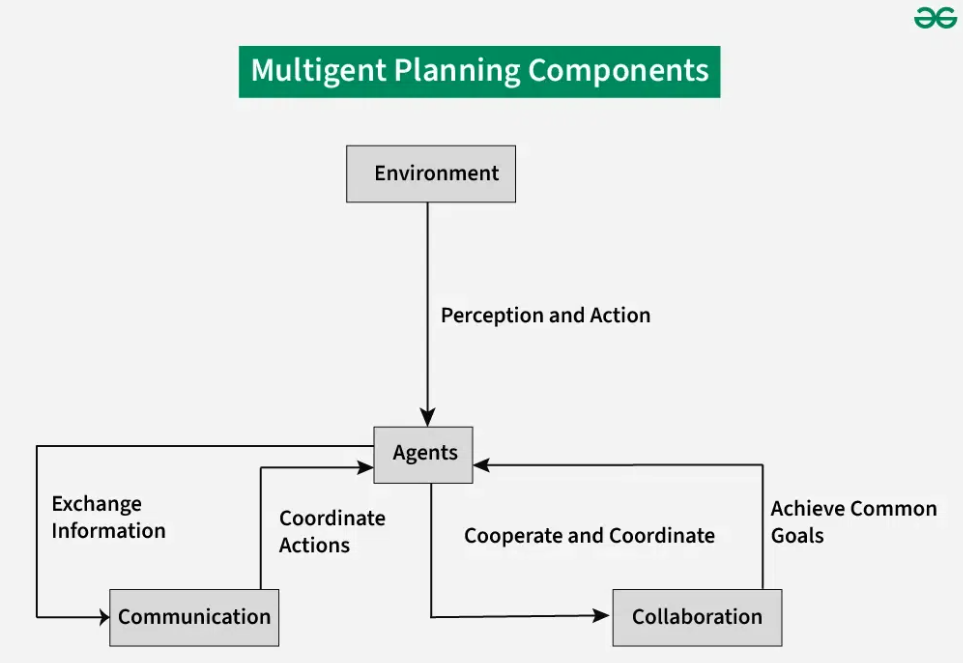
- 智能体(Agents):智能体在多智能体系统中具有自主性,通过传感器感知环境,借助执行器执行动作。智能体可设计内置流程(如算法或学习机制)以指导其行为。
- 环境(Environment):环境是智能体的运作场所,其特征会因各种因素随时间发生变化。环境的复杂性源于其规模、关联性和不可预测性。
- 通信(Communication):通信是多智能体规划的关键环节,智能体通过通信传递信息并同步行动,具体方式包括消息传递或共享内存。充分的通信是智能体协同工作、同步行动和解决冲突的前提。
- 协作(Collaboration):协作策略旨在促进智能体之间的互动和联合表现,包括任务分配、信息交换、冲突管理和团队建设。通过协作可汇聚集体智慧,提升整个系统的效率。
3 Multiagent Planning系统架构
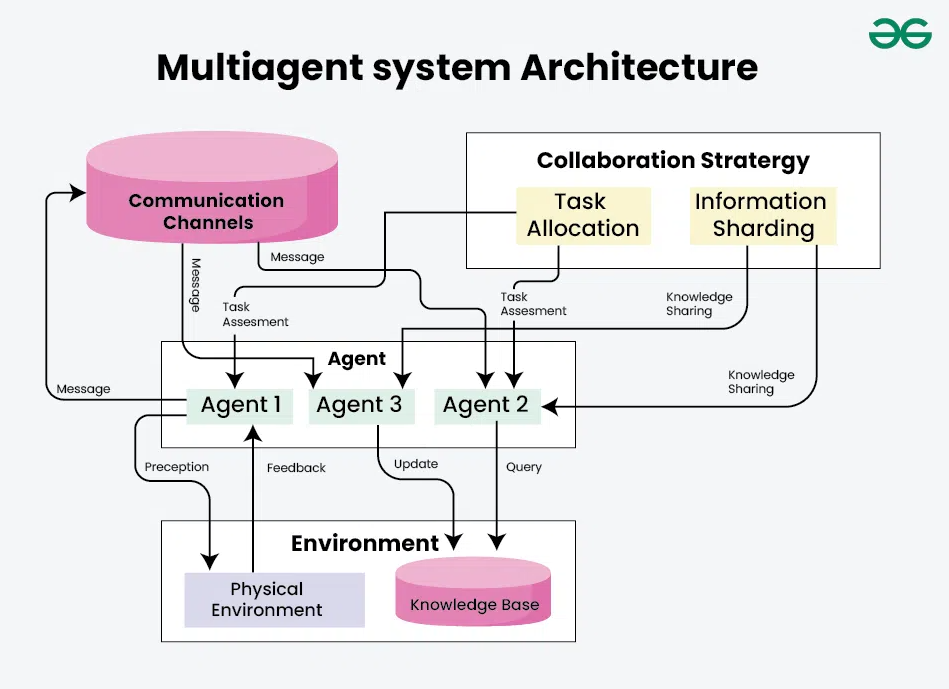
多智能体规划系统的核心包括:
- 目标指定(Goal Specification):将智能体分组协调,聚焦于共同的目标或任务。
- 知识共享(Knowledge Sharing):例如,智能体之间交换对决策至关重要的关键信息。
- 行动协调(Action Coordination):精心协调智能体的行动,避免冲突并实现协同效应。
- 适应性(Adaptation):制定策略以应对不断变化的挑战或目标,并具备灵活调整的能力。
4 Multiagent Planning的类型
- 集中式规划(Centralized Planning):由一个中央控制器根据整个系统的状态为所有智能体制定决策。这种方法简化了协调过程,但可能成为系统瓶颈,且存在单点故障风险。
- 分布式规划(Decentralized Planning):每个智能体根据本地可用信息和与其他智能体的有限通信自主制定决策。这种方法具有更强的鲁棒性和可扩展性,但协调难度较大。
- 分散式规划(Distributed Planning):一种混合方法,智能体需共享部分信息并调整自身计划以实现共同目标。该方法融合了集中式和分布式规划的优势,在协调需求和自主性之间取得平衡。
5 Multiagent Planning技术
- 分布式问题求解算法(Distributed Problem-Solving Algorithms):智能体通过这些算法将复杂问题分解为易于处理的子任务,并在彼此间分配这些子任务。每个智能体独立完成自身任务,同时与其他智能体交互以确保一致性和连贯性。
- 博弈论(Game Theory):博弈论为研究智能体之间的策略关系提供了工具,有助于理解智能体的竞争和合作行为,帮助它们在多智能体环境中做出最优决策。
- 多智能体学习(Multiagent Learning):多智能体学习基于智能体通过经验积累和与其他智能体的交互来提升性能。强化学习等方法使智能体能够适应动态环境和变化的目标。
- 通信协议(Communication Protocols):结构化且明确的通信协议规范了智能体之间的信息交换和同步方式。协议作为准则确保消息的统一发送和接收,为协作提供保障。
6 多智能体规划案例:仓库管理中的多机器人协调
假设某仓库中部署了多个机器人,其任务是拾取和放置物品以完成客户订单。以下是该系统的组件和功能解析
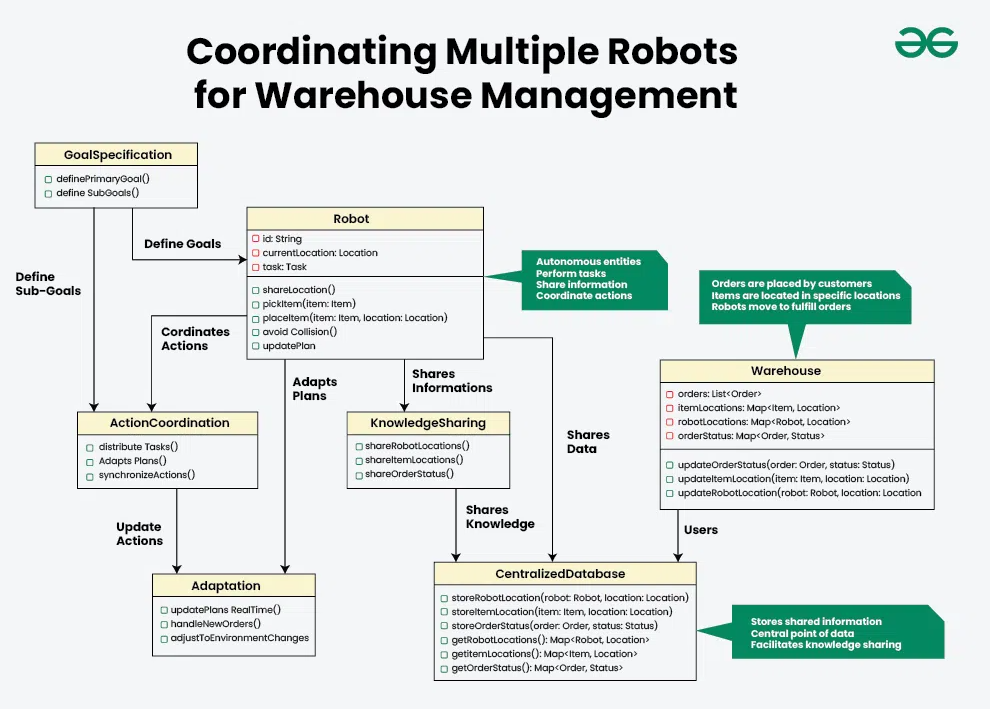
- 属性:
- id:每个机器人的唯一标识符。
- currentLocation:机器人在仓库内的当前位置。
- task:分配给机器人的具体任务。
- 方法:
- pickItem (item, location):从指定位置拾取物品。
- placeItem (item, location):将物品放置到指定位置。
- avoidCollision ():确保机器人避免与其他机器人或障碍物发生碰撞。
- updatePlan ():根据新数据或环境变化更新任务计划。
核心目标是快速完成客户订单,子目标包括缩短移动时间和避免碰撞。
- definePrimaryGoal ():设定机器人操作的主要目标。
- defineSubGoals ():将主要目标细化为子目标,指导机器人行动。
机器人通过分布式算法确定拾取物品和行进路径,协调机制确保两个机器人不会同时碰撞或处理同一物品。
- distributeTasks ():根据机器人的状态和位置分配任务。
- calculatePaths ():计算高效路线,以最短化移动时间并避免冲突。
- synchronizeActions ():协调机器人之间的行动时序,确保操作顺畅。
机器人通过中央数据库传递关于自身位置、物品位置和订单状态的信息。
- shareRobotLocations ():共享机器人位置,防止碰撞并优化路线。
- shareItemLocations ():分发仓库内物品位置信息。
- shareOrderStatus ():传递订单状态,便于更新和客户服务。
存储订单、物品和机器人操作相关信息。
- updateOrderStatus (order, status):更新系统中的订单状态。
- updateItemLocation (item, location):物品移动后更新其位置信息。
- updateRobotLocation (robot, location):跟踪并更新机器人位置。
作为操作数据的存储库,提供数据访问和更新的中心点。
- 存储功能:storeRobotLocation (robot, location)、storeItemLocation (item, location)、storeOrderStatus (order, status)
- 查询功能:getItemLocation ()、getRobotLocations ()、getOrderStatus ()
机器人根据仓库环境的实时信息(如新增订单或物品位置变化)持续调整计划。
- updatePlansRealTime ():实时更新计划。
- handleNewOrders ():处理新增订单。
- adjustToEnvironmentChanges ():适应环境变化。
机器人通过与中央数据库的交互获取和更新信息,知识共享和行动协调机制确保了高效运作,同时避免冲突和错误。本质上,该机器人系统通过数据驱动的决策和智能协调,在仓库环境中实现了机器人智能体的同步协作,从而优化效率和生产力。
采用多智能体规划具有以下优势:
- 效率(Efficiency):通过任务分配加速问题解决和决策过程。
- 鲁棒性(Robustness):共享智能提升系统可靠性,即使部分智能体出现故障或环境变化,仍能实现无缝运行。
- 可扩展性(Scalability):多智能体系统的分布式设计使其具有良好的可扩展性,可轻松添加更多智能体或组件,而无需担心集成问题。
- 灵活性(Flexibility):智能体的自主性和通信能力使其能够快速响应环境变化并做出相应调整。
多智能体规划在多个领域具有广泛应用:
多智能体规划是机器人技术的关键,它帮助机器人协作完成各类任务,例如未知地形探索、监控任务以及协作制造中的流水线组装。通过多智能体规划,机器人能够实现任务分配、避障和协同工作,达成共同目标。
多智能体规划是供应链的核心,它连接各个环节,协调生态系统内的物流和运营。仓库、配送中心、供应商和运输车辆等智能体协同工作,优化库存管理、简化物流流程并确保货物按时交付。多智能体系统通过需求预测、库存优化和路线规划等协作方式,提升供应链整体效率、降低成本并提高客户满意度。
在多人游戏中,多智能体规划用于构建高智能机器人,增强游戏的策略性和互动性。游戏角色或实体智能体在游戏环境中互动竞技,制定战术决策(如结盟与协作),并根据游戏局势动态调整策略,为己方争取优势。
智能电网整合多智能体规划技术,确保复杂电网中的能源分配和消耗协调。发电单元、用户、储能单元和电网控制系统等智能体协同工作,平衡供需、维护电网稳定性并促进能源节约和效率提升。需求响应程序、分布式能源资源管理和负载均衡算法等多智能体协调机制,有助于提高电网可靠性、整合可再生能源并推动能源技术的可持续发展。
尽管前景广阔,多智能体规划仍面临以下挑战和局限性:
- 通信开销(Communication Overhead):大量智能体之间的协作需要耗费大量计算资源和带宽。
- 可扩展性问题(Scalability Concerns):当涉及大量智能体或复杂环境时,计算能力和物流限制可能成为扩展瓶颈。
- 协调复杂性(Coordination Complexity):需要合适的算法和策略才能实现智能体之间高效协作。
- 隐私与安全(Privacy and Security):信息共享过程中涉及的敏感数据可能引发数据保密性和安全风险问题。
多智能体规划是人工智能领域的前沿方向,它赋予系统集体问题解决和共享目标实现的能力。随着技术的不断进步和创新解决方案的出现,多智能体系统将在应对和解决复杂现实世界问题中占据重要地位。
(翻译)")


")

